Led my FIRST Robotics software team, where I architected and maintained a large, high-performance software stack. This Java/Kotlin codebase, to which I personally contributed over 36,000 lines of code, helped us achieve the highest solo score among over 4,500 teams worldwide.
Key Technical Contributions:
- Architecture: Designed a robust control stack for a world-finalist team.
- Localization: Developed a real-time localization system by fusing ML vision, odometry, and ultrasonic data with Kalman Filters for precise on-field navigation.
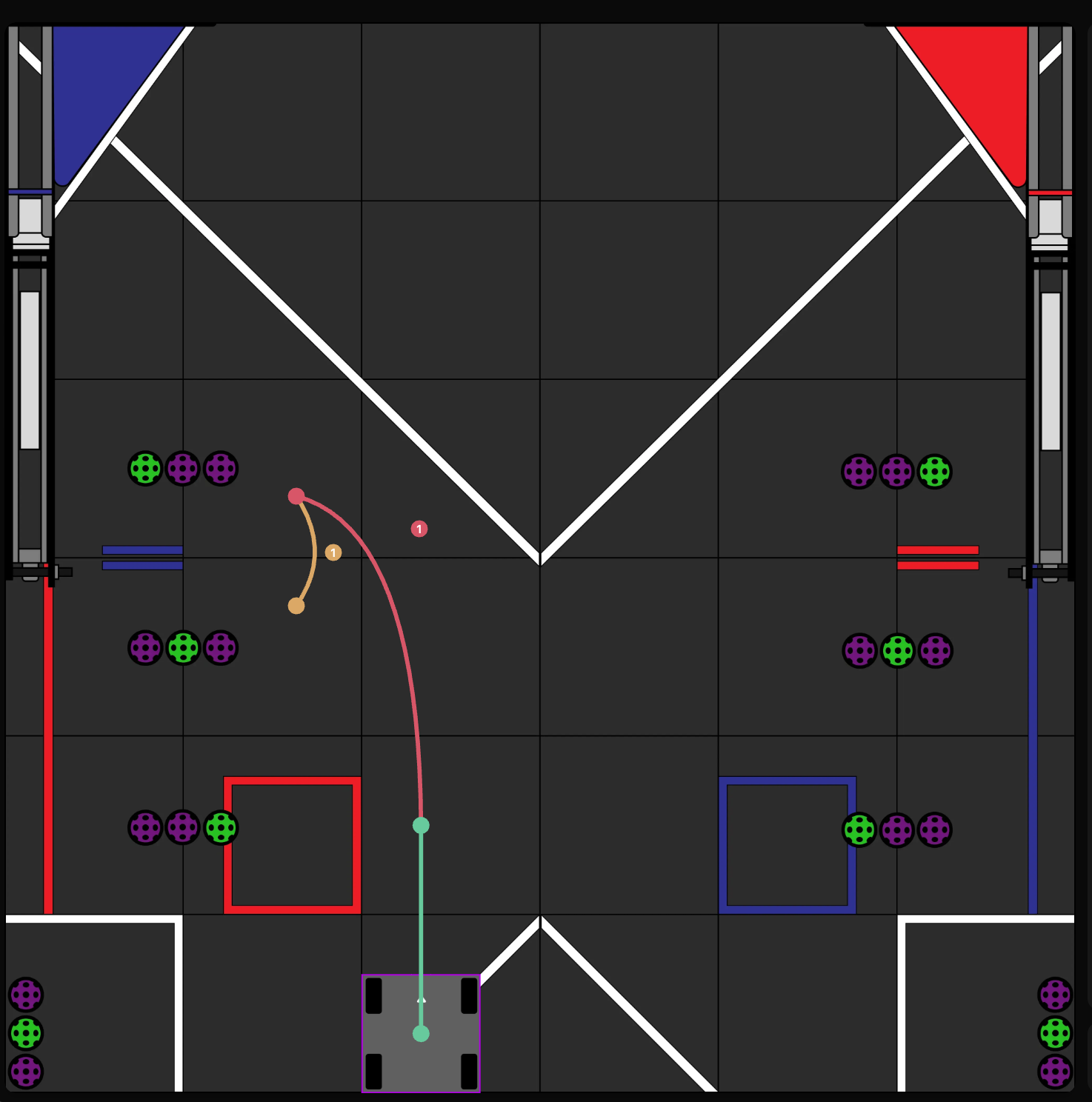
- Concurrency: Implemented a motion-profiled Bézier curve follower and managed complex concurrency with Kotlin Coroutines and Finite State Machines (FSMs) for parallelized autonomous execution.
- Leadership: Onboarded and trained 12 new student software developers over 3 years, ensuring technical excellence would be sustained long after I graduated.
Autonomous & Vision Systems
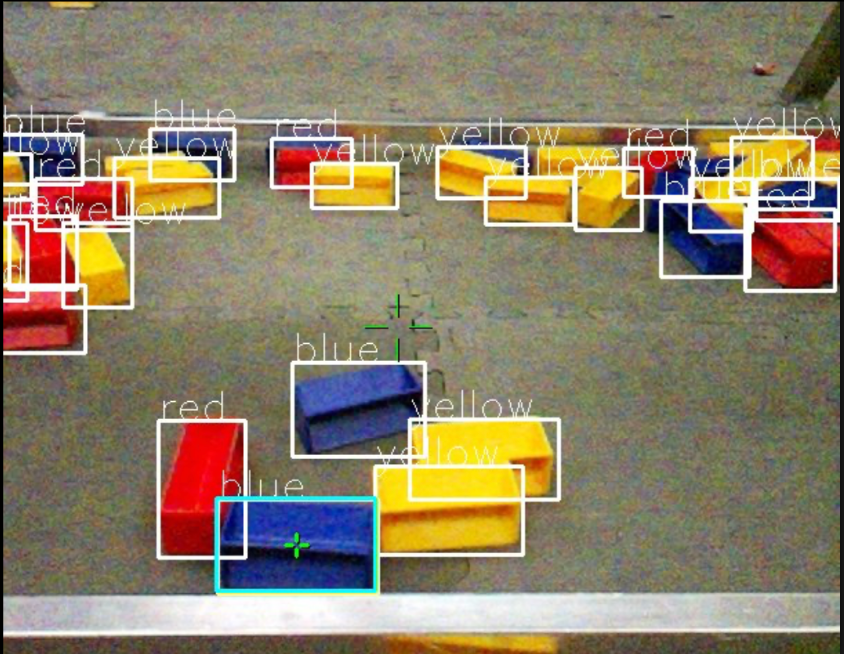
I designed robust autonomous routines with motion profiling and Bézier-based path following. A key component was integrating a TensorFlow vision model into the localization pipeline to detect game pieces and field elements.
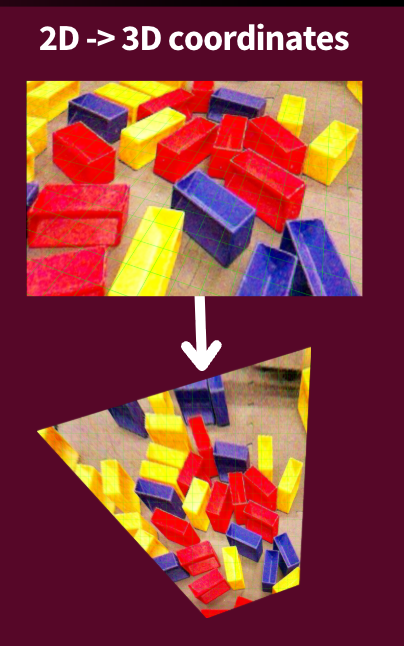
Below: Examples of the ML vision pipeline identifying game elements (AI Samples).